
Need Help ?
Download
Brochur
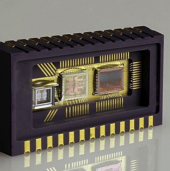
IBG 21
IBG21 is a small, rugged and shock-tolerant MEMS-based gyro system. The dual-side mounting
capability allows measurement of all three rotation axes on a single mounting plane.
IBG21 is based on the GyroSense concept and consists of a sensor chip, a mixed-signal ASIC and a
D-ASIC assembled in a non-magnetic package. Together, these components offer world-class MEMS-gyro performance.
The IBG21 can easily be tailored to your needs regarding rate and bandwidth through a digital SPI
interface.
Frequently Asked Questions
Inertial Measurement Units (IMUs) are integral components in Inertial Navigation Systems (INS), where they provide raw data that is used to calculate attitude, angular rates, linear velocity, and position relative to a global reference frame. At Imego AB, our IMU-equipped INS solutions form the backbone of navigation and control systems for a wide range of commercial and military vehicles, including crewed aircraft, missiles, ships, submarines, and satellites. IMUs are also crucial in the guidance and control of uncrewed systems, such as UAVs, UGVs, and UUVs.
Simpler INS variants, known as Attitude and Heading Reference Systems (AHRS), utilize IMUs to determine vehicle attitude and heading relative to magnetic north. The data gathered from our IMUs enables precise position tracking through dead reckoning, with results typically represented in Euler angles or quaternions.
In land vehicles, Imego AB's IMUs can be integrated into GPS-based automotive navigation and tracking systems, enhancing dead reckoning capabilities and improving the accuracy of data on speed, turn rate, heading, inclination, and acceleration. This is particularly valuable for applications such as traffic collision analysis.
Beyond navigational uses, IMUs developed by Imego AB serve as orientation sensors in a wide range of consumer products. They are found in nearly all smartphones and tablets, where they detect device orientation. Fitness trackers and other wearables use IMUs to measure motion, including activities like running. These units can also analyze specific parameters related to motion, aiding in the assessment of developmental levels in individuals.
In the gaming industry, IMUs are used in motion-sensing devices like the Nintendo Wii Remote. The proliferation of low-cost IMUs has also fueled the growth of the consumer drone industry. Additionally, IMUs are utilized in sports technology for technique training, animation applications, and motion capture technology. They are central to the balancing systems in personal transporters like the Segway.
Inertial Measurement Units (IMUs) are integral components in Inertial Navigation Systems (INS), where they provide raw data that is used to calculate attitude, angular rates, linear velocity, and position relative to a global reference frame. At Imego AB, our IMU-equipped INS solutions form the backbone of navigation and control systems for a wide range of commercial and military vehicles, including crewed aircraft, missiles, ships, submarines, and satellites. IMUs are also crucial in the guidance and control of uncrewed systems, such as UAVs, UGVs, and UUVs.
Simpler INS variants, known as Attitude and Heading Reference Systems (AHRS), utilize IMUs to determine vehicle attitude and heading relative to magnetic north. The data gathered from our IMUs enables precise position tracking through dead reckoning, with results typically represented in Euler angles or quaternions.
In land vehicles, Imego AB's IMUs can be integrated into GPS-based automotive navigation and tracking systems, enhancing dead reckoning capabilities and improving the accuracy of data on speed, turn rate, heading, inclination, and acceleration. This is particularly valuable for applications such as traffic collision analysis.
Beyond navigational uses, IMUs developed by Imego AB serve as orientation sensors in a wide range of consumer products. They are found in nearly all smartphones and tablets, where they detect device orientation. Fitness trackers and other wearables use IMUs to measure motion, including activities like running. These units can also analyze specific parameters related to motion, aiding in the assessment of developmental levels in individuals.
In the gaming industry, IMUs are used in motion-sensing devices like the Nintendo Wii Remote. The proliferation of low-cost IMUs has also fueled the growth of the consumer drone industry. Additionally, IMUs are utilized in sports technology for technique training, animation applications, and motion capture technology. They are central to the balancing systems in personal transporters like the Segway.
Modern inertial measurement units (IMUs) play a critical role in navigation systems by providing data that is processed to calculate altitude, velocity, and position. At Imego AB, we specialize in implementing Strap Down Inertial Systems, where angular rate data from gyroscopes is integrated to determine angular position. This information is combined with the gravity vector data from accelerometers, processed through a Kalman filter, to estimate attitude. This attitude estimate is then used to transform acceleration measurements into an inertial reference frame, where they are integrated once to obtain linear velocity and twice to determine linear position.
For instance, if an IMU installed in an aircraft detects an acceleration of 5 m/s² over one second, the onboard guidance system would calculate that the aircraft is now traveling at 5 m/s and has moved 2.5 meters from its initial position. When combined with a digital map display, the system can provide the pilot with real-time geographic positioning, similar to a GPS system but without the need for external communication with satellites or land-based transponders. This method, known as dead reckoning, allows for continuous navigation, with external sources like GPS being used to correct drift errors and ensure smooth position updates.
Historically, one of the first IMU-based navigation units was the Ground-Position Indicator developed by Ford Instrument Company for the USAF, which allowed aircraft to navigate without external input by providing real-time longitude and latitude information.
Despite their advantages, IMUs in navigation systems are susceptible to accumulated errors, or "drift," due to the continuous integration of acceleration over time. This leads to increasing discrepancies between the calculated and actual positions, which is why external corrections are often necessary. At Imego AB, we mitigate these challenges through advanced filtering techniques and integration with external systems like GPS to maintain accuracy and reliability in navigation.